
More Information
Submitted: June 09, 2025 | Approved: June 16, 2025 | Published: June 17, 2025
How to cite this article: Cojocaru AV, Balint S. Systems of Fuzzy Reasoning and Expert Knowledge-based Fuzzy Reasoning Systems, used in Modelling Real-world Phenomena. Int J Phys Res Appl. 2025; 8(6): 156-168. Available from:
https://dx.doi.org/10.29328/journal.ijpra.1001124
DOI: 10.29328/journal.ijpra.1001124
Copyright license: © 2025 Cojocaru AV, et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is propeRLy cited.
Keywords: Linguistic variable; The true value in a fuzzy reasoning system; Expert knowledge-based systems of fuzzy reasoning

Systems of Fuzzy Reasoning and Expert Knowledge-based Fuzzy Reasoning Systems, used in Modelling Real-world Phenomena
Andreea V Cojocaru and Stefan Balint*
Department of Computer Science, West University of Timisoara, 300223 Timisoara, Romania
*Address for Correspondence: Stefan Balint, Department of Computer Science, West University of Timisoara, 300223 Timisoara, Romania, Email: [email protected]
In this paper, the concept of ‘system of fuzzy reasoning’ is presented. It is the first temptation to expand ideas presented in [1] concerning ‘human intelligence’ linguistic variable and [2] concerning ‘truth value of fuzzy reasoning’ in the framework of the human intelligence linguistic variable. In ‘systems of fuzzy reasoning’, besides the ‘human intelligence’ linguistic variable also other linguistic variables are also used. An expert knowledge-based system of fuzzy reasoning describing the dynamics of a real-world phenomenon is presented.
Systems of fuzzy reasoning provide a theoretical framework for modelling. First, by defining the concept of system of fuzzy reasoning, its properties, and then by stating the necessary and sufficient conditions to encompass all possible ‘If…THEN …’ statements. Finally, selecting the resulting membership function [3]. pg.81. More statements that are general can be formulated on a system of reasoning than on arbitrary ones. Linguistic variables can often be used to transform non-numerical reasoning premises and responses into a numerical form.
Definition 1.1
A system of fuzzy reasoning is a set of fuzzy reasonings Ri
Ri = If(a1 is Ai1) U+22C8i1 (a2 is Ai2) ⋈i2 … ⋈ik-1 (ak is Aiik) then (bi is Bi) (1.1)
where:
i = 1, … , I, k = 1, … K, Aiik and Bi are triangular or trapezoidal fuzzy subsets of the set of real numbers .
The symbols denoted by are fuzzy statements (called by some people arguments), the symbols a1, a2, … , ak are real numbers and are called premises. The symbols denoted by (bi is Bi) are fuzzy statements, called individual consequences or responses. The symbols bi are real numbers. The membership functions of the fuzzy subsets Aiik and Bi are denoted by respectively. The symbol denoted by ⋈i is one of the fuzzy logic operators: NOT, AND, OR, XOR.
According to [2], the part of the fuzzy logic reasoning Ri (see formula (1.1)) denoted by
(a1 is Ai1) ⋈i1 (a2 is Ai2) ⋈i2 … ⋈ik-1 (ak is Aiik) (1.2)
is called a fuzzy logic expression of Ri.
Remark that, according to this definition, the number of arguments can be different for different logical expressions of the system. Concerning this aspect, we point out that it is possible to formulate all reasoning with a common number K of arguments by taking for arguments k, which are not used in rule i, the membership function
To calculate the response of a fuzzy reasoning system = {R1, R2, … em>RI}, the truth value of reasoning R1 (degree of fulfillment DOF(R1)) has to be evaluated using a selected inference method. In the next step, the responses of the individual’s reasoning are combined with the help of a combination method. Finally, a defuzzification method transforms the fuzzy reasoning system's response to a crisp result. This procedure can be considered as the definition of a function assigning the final (crisp) result to the input.
The subject of the truth value DOF() of a fuzzy logic reasoning R1
R1 = If(a1 is Ai1) ⋈i1 (a2 is Ai2) ⋈i2 … ⋈ik-1 (ak is Aiik) then (bi is Bi)
is largely discussed in [2], in the framework of the ‘human intelligence’ linguistic variable.
In the following, we expand the truth value computation for a system of fuzzy logic reasoning by using several illustrative examples of such computation.
Example 1.1 (system of two reasonings with one premise) Consider the fuzzy reasoning system R consisting of two reasonings R = {R1, R2} and one premise a1. The reasons are given by
In case of the fuzzy reasoning R1, the logical expression is the statement (a1 is a11) whose truth value is
In case of the fuzzy reasoning R2, the logical expression is the statement (a1 is a21) whose truth value is
The normed weighted sum of a combination of individual responses (DOF, Bi) is the overall fuzzy consequence B with the membership function [2] pg.086.(1.3)
Computing βi. we find β1 = β2 = 1. Hence
For 1 < a1 < 2 after replacing the following result is found:
According to [2] p. 086. The membership function fB(x) of the overall fuzzy consequence B for 1 < a1 < 3 is the fuzzy subset represented in the next Figure 1.1:
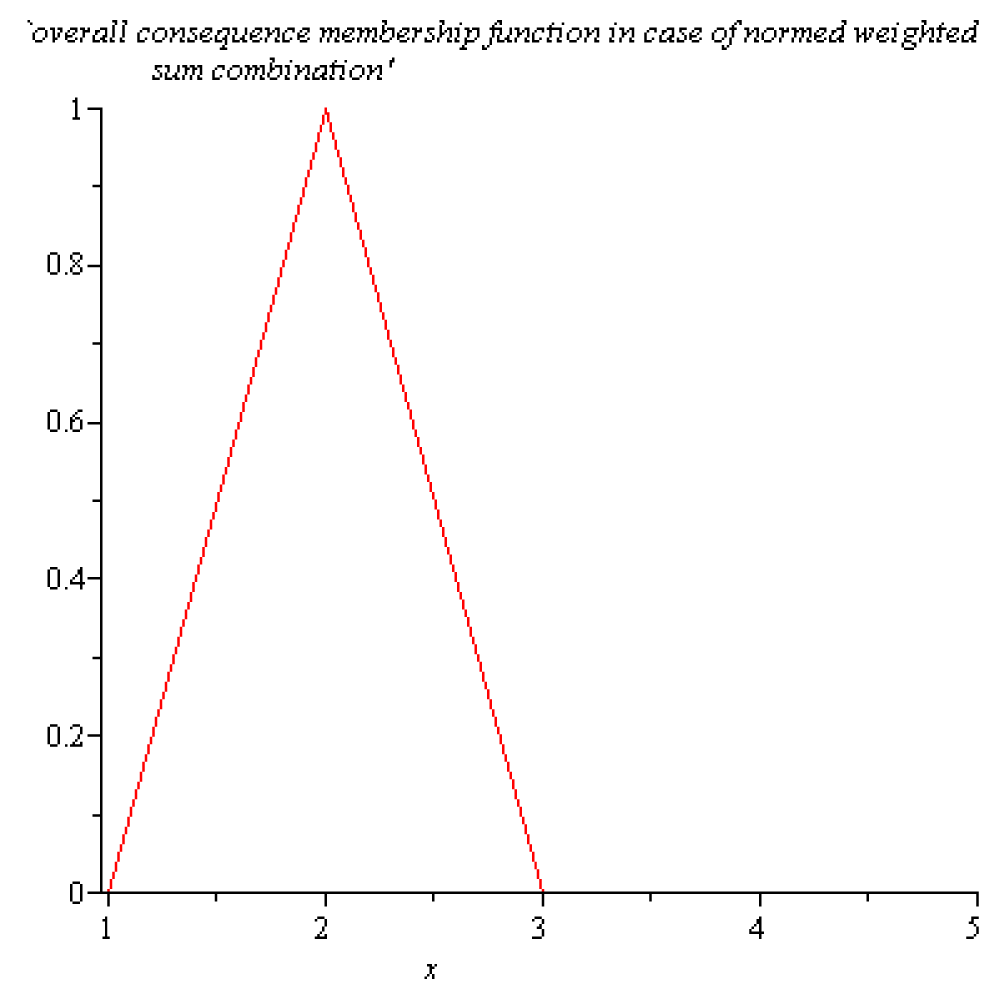
Figure 1.1:Membership function fB(x) of the overall fuzzy consequence B for 1 < a1 < 3.
The fuzzy mean of the overall fuzzy consequence B, denoted by M(B), and defined by
(1.4)
is the location of the overall fuzzy consequence B. It is also called the center of gravity or centroid. This is the number for which the part of the membership function fB(x) on the left of this number is in equilibrium with the right side. The equilibria occur when the moments corresponding to the two sides are equal. Computing the fuzzy mean directly by using formula (1.4), the following result is found: M(B) = 2. Therefore, the equilibrium in the case of this example is situated at the point x = 2.
On the other hand, according to [2], when the normed weighted sum combination and mean defuzzification are used, the following equality holds:
(1.5)
Where d1, d2 are the truth values of the logical expression of the fuzzy reasoning R1, R2, respectively, and M(B1), M(B2) are the mean value of the individual answers of the fuzzy reasoning R1, R2, respectively. In case of the system of fuzzy reasoning R = {R1, R2}
For 1 < a1 < 2, the following equality holds:
d1 = a1 -1, d2 = 0, M(B1) = 2 M(B2) = 4
Replacing these values in formula (1.5), it follows that
Remark that the localization of equilibrium obtained with (1.5) is the same as that obtained with (1.4) via membership function.
For 2 < a1 < 3, d1 = 3 - a1, d2 = a1 - 2, M(B1) = 2, M(B2) = 4. Replacing these values in formula (1.5), the following result is found:
Therefore, when 2 < a1 < 3, the equilibrium is located at the point x = 2 × a1 – 2.
For 3 < a1 < 4, d1 = 0, d2 = 4 - a1, M(B1) = 2, M(B2) = 4. Replacing these values in formula (1.5), the following result is found:
Therefore, when 3 < a1 < 4, the equilibrium is located at the point x = 4.
The number R(a1) = M(B)(a1), assigning the final (crisp) result to the input a1, is considered the location of the truth value of the system of fuzzy reasoning R = {R1, R2} corresponding to the input a1. The graphic of the function R(a1) = M(B)(a1) is presented in the next Figure 1.2:
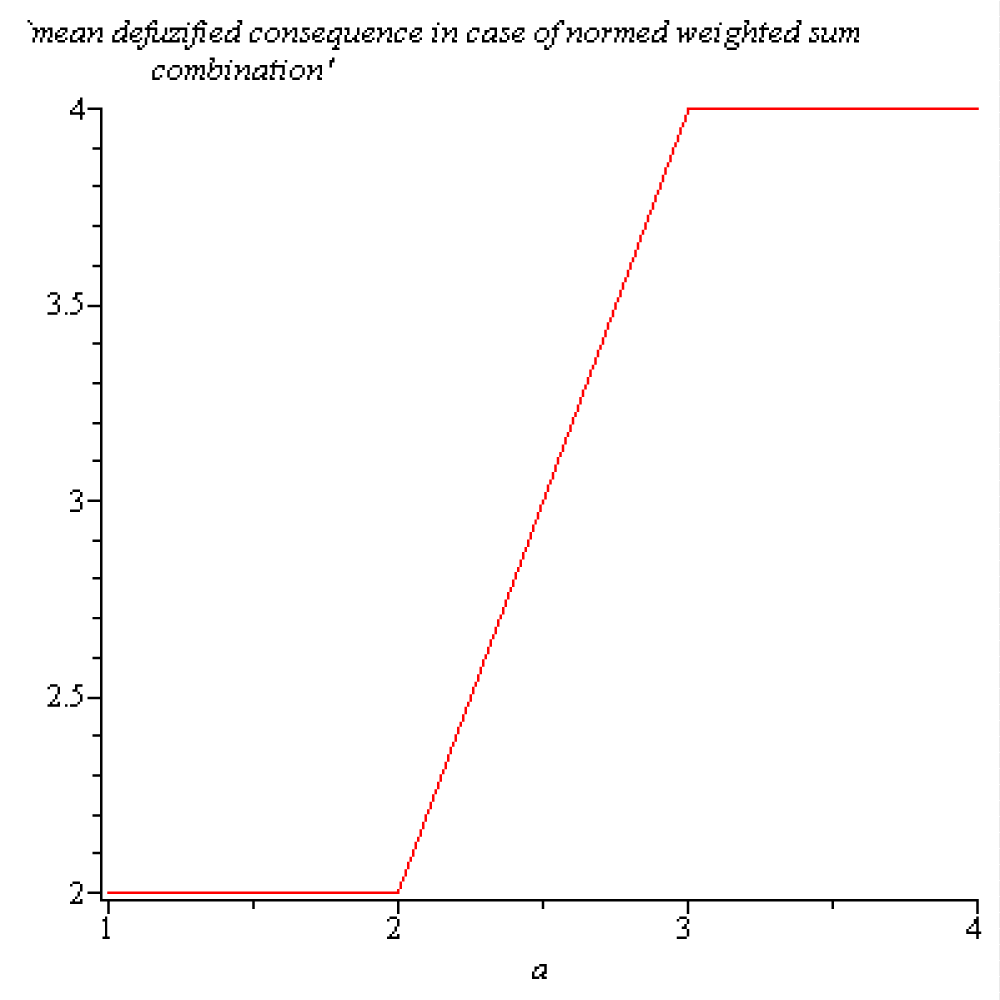
Figure 1.2: Location of the truth value of the overall response of the system of fuzzy reasoning R = {R1, R2}.
Figure 1.2. Show that: for one input a1 ∈ [1,2] the truth value of the overall response of system is located at 2, for one input a1 ∈ [2,3] the truth value of the overall response of system is located at 2a1 - 2, for one input a1 ∈ [3,4] the truth value of the overall response of system is located at 4. It can be seen that the centroid is constant if a small perturbation of the input a1 ∈ (1,2) ∪ (3,4) occurs. For input a1 ∈ [2,3], the truth value location of the overall response of the system increases linearly from 2 to 4. This interval is more appropriate to control the equilibrium location via the premise a1.
Example 1.2. (Example 4.4. Pg. 90. [1], system of three reasonings with one premise. Consider the fuzzy reasoning system R consisting of the following three fuzzy reasonings, R = {R1, R2, R3}:
The truth values of fuzzy logic expressions of reasoning are:
On the interval [1,5], the DOFRi(a) can be written as
On the other hand:
Therefore, considering the normed weighted sum combination with mean defuzzification, the resulting overall consequence location of the fuzzy reasoning system R = {R1, R2, R3}: is defined as the following one variable function R(a) = M(B)(a) (relation 3.3.5 pg.73 [1]:
(1.5)
Hence, we obtain:
The graphic of the one variable function R(a) = M(B)(a) for a ∈ A is represented in the next Figure 1.3:
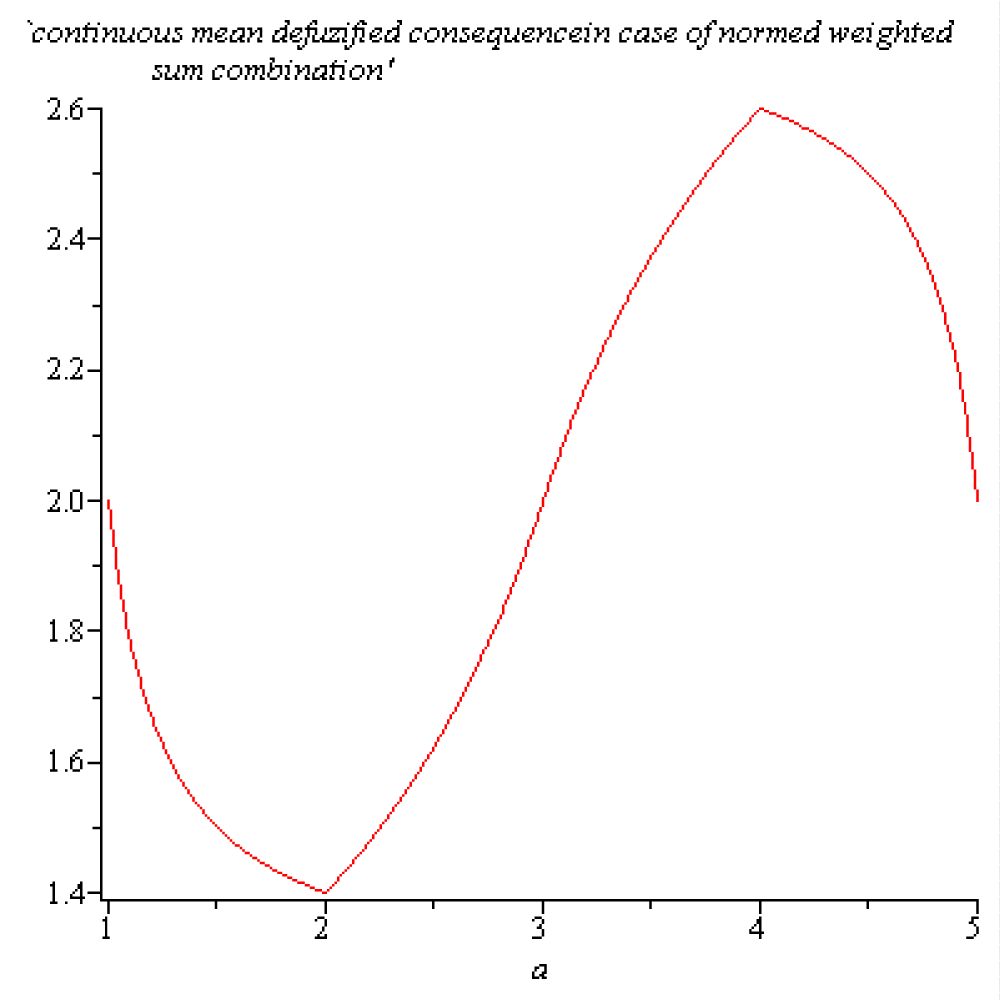
Figure 1.3: Location of the truth value R(a) = M(B)(a) of the overall response of system of fuzzy reasoning R = {R1, R2, R3}for a ∈ [1,5].
Example 1.3 (system of two reasonings with two premises) Consider the fuzzy reasoning system R consisting of two reasonings R = {R1, R2} where the reasonings are given by:
For the maximum combination B of B1, B2 [2] pg.0.84, the membership function of the overall response is:
The mean value M(B)(a1,a2)(centroid or center of gravity) of the defuzzified consequence B, denoted by R(a1,a2), is used in multiplicative or additive form for the location of the truth value of the fuzzy reasoning system. In this case, it is:
and
Therefore:
The location R(a1, a2), of the truth value of the fuzzy reasoning system in the case of the overall answer is presented in the next Figure 1.4:

Figure 1.4: R(a1, a2) = M(B) (a1, a2) for (a1, a2) ∈ [1, 3] × [2,4].
Other combinations can also be used. Using, for example, normed weighted sum combination and mean defuzzification, the overall response location can be obtained directly by using the formula:
(1.6)
Where d1, d2 are the truth values of the logical expression of the fuzzy reasoning R1, R2, respectively, and M(B1), M(B2) are the mean value of the individual answers of the fuzzy reasoning R1, R2, respectively. In case of the same system of reasoning
Using the already computed truth values
and the values of M(B1) = 2, M(B2) = 4 computed using formula
(1.7)
and replacing in (1.6), for the overall responses R(a1, a2) = M(B)(a1, a2), the following result is found:
(1.8)
A system of fuzzy reasoning is complete or consistent on a set of premises A if it can provide an answer to all possible questions concerning the phenomenon modeled, see[3], pg.82. More precisely:
Definition 2.1. The system of fuzzy reasoning
is complete on the set ofpremises A if for every premise the corresponding and the combined response set is a nonempty fuzzy set.
Note that the definition requires not only that for every premise there should be a reasoning i with a non-empty response, but it also requires the combined response to be non-empty. The completeness of a system of fuzzy reasoning depends on the set of premises A on which the reasoning system's responses are to be found, and on the combination method used. The defuzzification does not influence the completeness of the reasoning system. The minimum combination seeks the difficult task of finding complete agreement, while the other methods only exclude responses that are impossible for each rule. Therefore, it is not surprising that the condition of completeness is easier to fulfill using the maximum or additive combination methods than using the minimum one. For a system of fuzzy reasoning, the following statements can be formulated regarding completeness.
Statement 2.1. [3]. pg.83. The fuzzy reasoning system used with maximum or additive combination method is complete on the premises set A if and only if for each premise there is a reasoning Ri such that
Statement 2.2. [3]. pg.83. The system of fuzzy reasoning used with the minimum combination method, is complete on the premises set A if and only if
1. for each premise there is a reasoning Ri such that
and
2. For any couple of two rules Ri and Rj. if there is such that then
If the minimum combination is used, then the fuzzy reasoning system considered in Example 1.3 is not complete on the interval A = [2,3]. That is because for any
If the maximum combination or additive combination is used, then the fuzzy reasoning system considered in Example 1.3 is complete on the interval A = [2,3].
The completeness of a system of fuzzy reasoning used with maximum or additive combinations depends only on the ‘range’ on which the arguments are defined. This ‘range’, which is called the support of a system of fuzzy reasoning, is defined as follows:
Definition 2.3. The support of the fuzzy reasoning
Ri = If(a1 is Ai1) ⋈i1 (a2 is Ai2) U+22C8i2 … U+22C8ik-1 (ak is em> Aiik) then (bi is Bi)
Is the K - dimesional set defined by
Statement 2.3. [3].pg.84.The system of fuzzy reasoning used with maximum or additive combinations, is complete on A if and only if
Statement 2.4. [3].pg.86.The system of fuzzy reasoning used with maximum or additive combinations is complete on
The overlap between the premises is an important property of fuzzy reasoning systems. It thus seems that general fuzzy reasoning systems may be at least partly redundant. However, this is not true: even reasoning whose premises are completely covered by other reasoning might still modify the consequences. Therefore, the possibility of removing fuzzy reasoning from a general fuzzy reasoning system without a major change in the consequence cannot be judged based on only the premises. It should be done by comparing the response set. In order to know which fuzzy rules can be removed, a measure of the overlap was defined. For more details, see [1]. Pg. 87. In the following, we intend to give an illustrative example concerning what happens if a fuzzy rule is removed.
Example 2.1. ([3].86). Consider the general fuzzy reasoning system R consisting of three reasoning where the reasoning is given by:
The premise of the third reasoning is fully covered by the premises of the other two reasonings. The fuzzy reasoning system would remain complete (even for the minimum combination) on A = [1.5,2.5] if the third rule were removed. On the other hand, the consequence of using mean defuzzification and additive combination with
Assessment of fuzzy reasoning is a procedure where knowledge and / or available data are translated or encoded in fuzzy reasoning. Since fuzzy reasoning system responses both on the combination and defuzzification method applied, this choice has to be taken into account in the assessment.
According to [3], at least four different ways to assess a fuzzy reasoning system may be distinguished:
a) The fuzzy reasoning system is known by the experts and can be defined directly.
b) The fuzzy reasoning system can be assessed by experts directly, but available data should be used to update it.
c) The fuzzy reasoning system is not known explicitly, but the variables required for the description of the system can be specified by experts.
d) Only a set of observations is available, and a fuzzy reasoning system has to be constructed to describe the interconnection between the input/output elements of the data set.
In this section, we will provide a system of fuzzy reasoning based on expert knowledge.
Consider algae growth in a water body receiving a steady loading of nutrients, including dissolved oxygen. It has been observed that available nutrients x and algae biomass y vary in time and oscillate. Let x and y be measured on the scale between 0 and 1. For the fuzzy reasoning construction, let only two state descriptors, high h and low l, be used. For describing the process in terms of a system of fuzzy reasoning, let us consider the expert knowledge incorporated in the following two triangular fuzzy numbers defined on the unit interval [0,1]:
(3.1)
With respect means:
(3.2)
According to experts, the transitions between the states can be described as: starting with states at moment t, the level of available nutrients and algae is h. In the next time of period (let say 1 unit) the following process take place: algae reduce nutrients to in turn because nutrients are insufficient algae become the nutrients are replenished and become in the next period again algae become Schematically:
(3.3)
This description is fuzzy, and to describe the process in terms of a system of fuzzy reasoning, let us consider the following system of fuzzy reasoning:
(3.4)
The system of fuzzy reasoning (3.4) is an algae growth model and can be used to construct the state vector trajectory in a continuous space for a given initial state (x(0), y(0)). This trajectory is unique.
To illustrate the above proposition, consider the mean defuzzification and the normed weighted sum combination method
(3.5)
Since in all reasoning the product fuzzy logic operator AND is used in formula (3.5), we replace:
(3.6)
Remark that he membership functions are given:
(3.7)
(3.8)
For the initial state x = 0.5, y = 0.6 the membership values are:
(3.9)
And the DOF - s values appearing in (3.6) are:
In case of nutrients x, the mean values M(Bi) of individual consequences are replaced by
(3.10)
In case of algae y, the mean values M(Bi) of individual consequences are replaced by
(3.11)
obtaining:
(3.12)
(3.13)
The same procedure is used to obtain x(t+1), y(t+1) as function of x(t), y(t) for t = 1,2,…
For computing the state (x(2),y(2)) we have to start with the initial values and compute the following DOF - s
In case of nutrients x, the mean values The same procedure is used to obtain of individual consequences will be replaced by
In case of algae y, the mean values The same procedure is used to obtain of individual consequences will be replaced by
obtaining:
(3.14)
(3.15)
For computing the state (x(3), y(3)) we have to start with the initial values (x(2), y(2)) = (0.6582944494, 0.2974125877) and compute the following DOF - s
For nutrients x using the mean values M(Bi) of individual consequences
The computed value of x(3) is x(3) = 0.7599999999
For algae y, using the M(Bi) of individual consequences will be replaced by
The computed value of y(3) is y(3) = 0.7018876635
For computing the state (x(4), y(4)) we have to start with the initial values (x(3), y(3)) = (0.7599999999,0.7018876635) and compute the following DOF – s
For nutrients x using the mean values M(Bi) of individual consequences
The computed value of x(4) is x(4) = 0.2699999999
For algae y, using the M(Bi) of individual consequences will be replaced by
The computed value of y(4) is y(4) = 0.7599999999
The dynamics of the nutrient evolution and that of the algae evolution during the first four steps are represented in the next Figure 3.1.
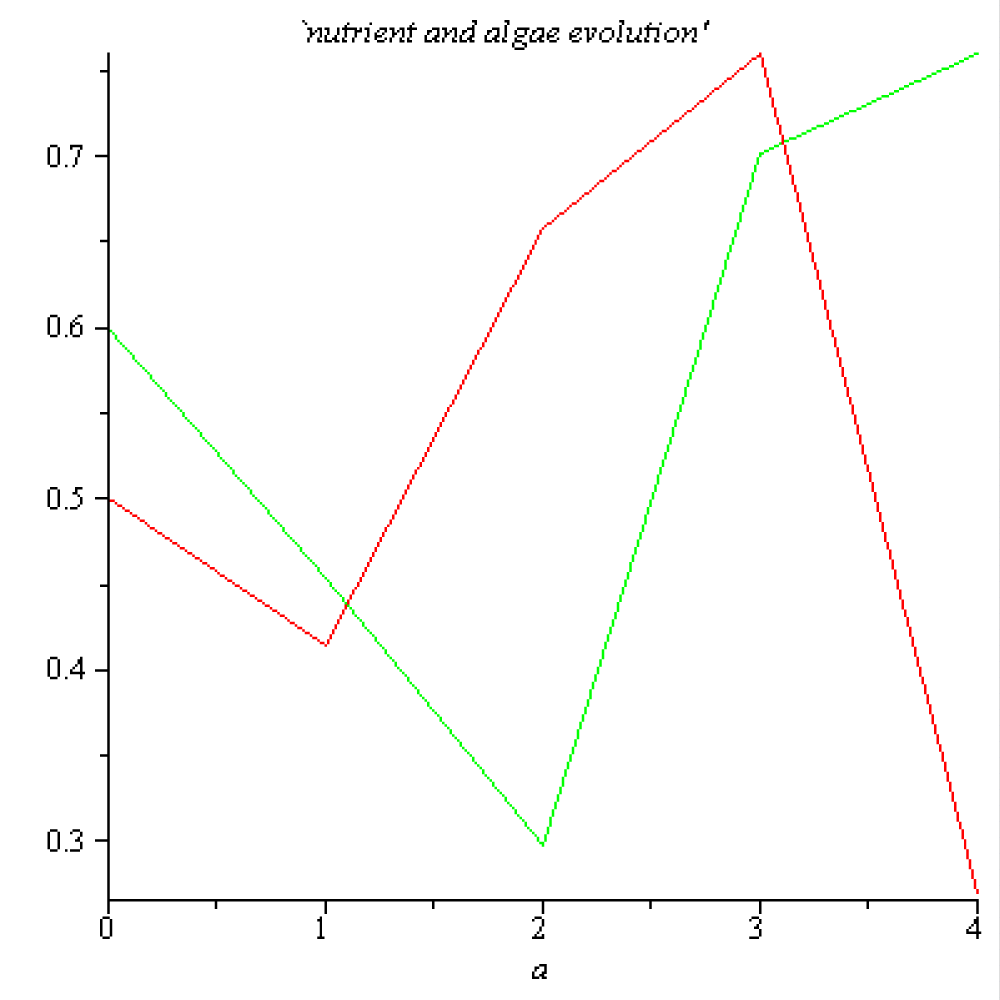
Figure 3.1: Nutrient evolution color red, Algae evolution color green.
For other descriptions, with a system of fuzzy reasoning, of dynamics of real-world phenomena, [4-8].
In this paper, the concept of ‘system of fuzzy reasoning’ is presented. Basic properties of the concept are underlined. Illustrative examples are given. An example of a model, describing real-world phenomena, using an expert knowledge-based system of fuzzy reasoning is provided.
Contribution
The two authors contributed equally to the realization of this work. All authors have read and agreed to the published version of the manuscript.
Acknowledgment We acknowledge the Department of Computer Science, namely Prof Dr. Daniela Zaharia, for encouraging this research.We acknowledge the Department of Computer Science, namely Prof Dr. Daniela Zaharia, for encouraging this research.
- Cojocaru AV, Balint S. The ‘human intelligence’ linguistic variable is a potential fuzzy computational model for the natural languish expression ‘human intelligence. Computing&AI Connect. 2025;2:2025.0015. https://doi.org/Registering%20DOI
- Cojocaru AV, Balint S. What is the true value of fuzzy reasoning in the framework of the ‘human intelligence ‘linguistic variable? Int J Phys Res Appl. 2025;8(4):065-100. Available from: https://dx.doi.org/10.29328/journal.ijpra.1001117
- Bardossy A, Duckstein L. Fuzzy rule-based modeling with applications to geophysical, biological, and engineering systems. Boca Raton: CRC Press; 1995;256. Available from: https://doi.org/10.1201/9780138755133
- Zimmermann HJ. Fuzzy set theory and its application. 4th ed. Springer Science + Business media; 2001. Available from: https://link.springer.com/book/10.1007/978-94-010-0646-0
- Dubois D, Prade H. Possibility Theory: An approach to computerized processing of uncertainty. New York: Plenum Press; 1988;268. Available from: https://archive.org/details/possibilitytheor0000dubo
- Yasunobu S, Miyamoto S. Automatic train operation system by predictive fuzzy control. In: Sugeno (ed). Industrial applications of Fuzzy control. North Holland, Amsterdam; 1985;1-18.
- Shingu T, Nishimori E. Fuzzy based automatic focusing system for a compact camera. In: Proceedings of the third IFSA Congress; 1989;436-439.
- Holmblad LP, Ostergaard JJ. Control of cement kiln by fuzzy logic. In: Gupta MM, Sanchez E (eds). Fuzzy Information and Decision Processes. North Holland, Amsterdam; 1982.