
More Information
Submitted: June 03, 2026 | Accepted: June 09, 2026 | Published: June 10, 2026
Citation: Bhandari PN, Bhandari NM. The Illusion of Curved Space-time: A 3D Euclidean Derivation of Gravitational Precession. Int J Phys Res Appl. 2026; 9(6): 212-216. Available from:
https://dx.doi.org/10.29328/journal.ijpra.1001158
DOI: 10.29328/journal.ijpra.1001158
Copyright license: © 2026 Bhandari PN, et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Nomenclature: M1, M2: Classical resting masses of the primary and secondary bodies; M_is1, M_is2: Active Shadow Cone Masses (the active participating mass); R1, R2: Physical radii of the primary and secondary spherical bodies; d: Deep-space orbital spatial distance between geometric centres; D: Absolute topological distance (accounting for physical body thresholds); d_x: Deep-space optical intersection window diameter; D_x: Absolute topological intersection window diameter; V_cone: Spatial volume of the localised shadow cone; V_cap: Spatial volume of the physical spherical cap protruding past the intersection plane; V_active: Total displaced active shadow volume (V_cone + V_cap); f_v: Volumetric fraction modifier over an eccentric orbit; e: Orbital eccentricity; ν₀: Intrinsic unshadowed proper frequency; F_ExS: Gravitational force formula incorporating an external energy source

The Illusion of Curved Space-time: A 3D Euclidean Derivation of Gravitational Precession
Pushpak N Bhandari1 and Nandan M Bhandari2*
1Ph.D, Purdue University USA
2MSc, University of Saskatchewan, Canada
*Address for Correspondence: Nandan M. Bhandari, MSc, University of Saskatchewan, Canada, Email: [email protected]
We present a geometric framework for gravitational interaction based on the concept of energy-shadow regions generated by finite-sized bodies embedded within a background energy medium. The model introduces active shadow-cone masses and associated spherical-cap corrections arising from the three-dimensional geometry of interacting bodies. Starting from this geometric construction, closed-form expressions are derived for a baseline inverse-square force and an additional perturbative term associated with orbital precession.
The framework reproduces the classical inverse-square dependence in the limiting cone approximation while introducing a volumetric correction linked to the physical curvature of spherical bodies. A dimensionless volumetric ratio is shown to generate a precessional contribution that scales with the kinematic factor v²/c². Application of the model to Solar System planets and binary pulsars yields values consistent with observed precessional shifts over a wide range of orbital velocities and eccentricities. The results suggest that certain gravitational and precessional phenomena may admit an alternative geometric interpretation based on finite-body volumetric effects. Further observational and experimental tests will be required to assess the physical validity and predictive power of the proposed framework.
In the philosophy of science, Occam's Razor dictates that the most elegant explanation, requiring the fewest assumptions and manufactured complexities, is almost always the correct one. Historically, when a foundational theory is misaligned with physical reality, scientists are forced to invent complex mathematical modifications to save it, much like the Ptolemaic epicycles used to justify an Earth-centric solar system.
For centuries, classical mechanics has calculated gravity using a mathematical shortcut known as the "point-mass. [5]" It treats massive celestial bodies as if their mass were crushed into infinitely small, 1-dimensional dots. While making calculations easier, it erases the physical reality that planets are massive, 3-dimensional spheres.
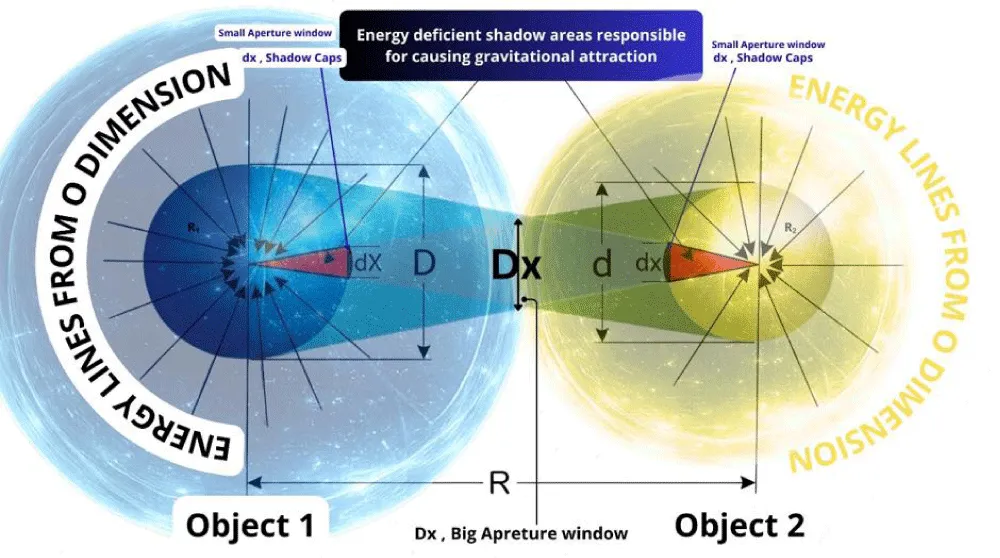
The D_x-Factor framework [1-3] restores 3-dimensional reality to celestial mechanics. Space is not an empty vacuum, but a pressurized medium of background energy. Gravity is not an invisible string pulling two bodies together [1-3]; it is a localized "energy shadow" created when two 3D spheres displace this background flux. By mapping the exact geometry of these interacting shadows, we derive the true mechanical formula for gravity and reveal the kinetic engine behind orbital precession.
1.1 Testability and falsifiability of the ExS framework
A robust theoretical framework must be strictly falsifiable. While the present manuscript focuses on the geometric and mathematical derivation of macroscopic orbital precession, the ExS framework makes highly specific, testable predictions regarding local gravitational fields. Because the framework relies on physical shadow-cone interference rather than static spacetime curvature [5], it predicts that the Earth's local gravitational acceleration (g) must experience microfluctuations corresponding to the geometric alignment of the Sun and Moon (e.g., """across the 29.53-day synodic lunar cycle). These fractional geometric variations are theoretically measurable using modern high-frequency superconducting gravimeters. The framework would be explicitly falsified if high-resolution gravimetry across the synodic cycle showed only classical equilibrium tidal responses with no transient geometric interference signals. A comprehensive experimental validation utilizing global superconducting gravimeter data is currently in preparation for a subsequent publication.
Originally, the foundational goal of this framework was to prove that macroscopic gravity is the direct consequence of localized energy shadows cast within an external background energy medium. By modeling the energy deficiency generated by these geometric shadows, an empirical equation was derived that accurately fits observed gravitational phenomena. The foundational kinetic force was expressed as [1,]:
F = 2K (M_is1 + M_is2) c² M_is2 [D/d_x² + d/d_x²] (2.1)
F = 2K (M_is1 + M_is2) c² M_is2 [(D + d) / d_x²] (2.2)
During the application of this foundational model to evaluate the anomalous orbital precession of Mercury, a hidden physical reality was discovered. It became apparent that the original equation implicitly contained two parts: a classical Newtonian baseline, and a distinct secondary component contributing exclusively to precessional energy. To bridge this external kinetic framework with observable macroscopic orbital mechanics — and to isolate the precessional component without relying on relativistic contributions — the geometric structural constant (K) was explicitly defined in terms of the classical gravitational constant (G) and the spatial boundary. By setting K = 32G / [c² (D + d)], and substituting it back into the foundational equation, a profound mathematical collapse is triggered.
The relativistic kinematic term (c²) and the spatial distance sum (D + d) perfectly cancel out:
F = 2 × [32G / c² (D+d)] × (M_is1 + M_is2) × c² × M_is2 × [(D+d) / D_x²] (2.3)
F = 64G × M_is1 × M_is2 / D_x² (2, 4)
Note: In macroscopic planetary systems where Mis1 >> Mis2, the primary shadow mass dominates the initial mass-addition bracket.
This mathematical collapse actively removes the speed of light (c) from the mechanical structure of the gravitational force, setting the stage for a purely volumetric derivation of orbital precession.
To understand how the classical physical masses map to the active shadow masses (M_is) within this collapsed force equation, we isolate the strict geometry of the primary shadow structure: the Shadow Cone.
3.1 The deep-space intersection window (d_x)
The diameter of the deep-space intersection window (d_x) is inversely proportional to the orbital distance d:
d_x = 2R₁R₂ / d (3.1)
3.2 The volume of the cone (V_cone)
The radius of the intersection window is d_x/2. The physical volume of the active shadow cone (depth h ≈ R₁) is:
V_cone = (1/3) π (d_x/2)²R₁ = πd_x²R₁ / 12 (3.2)
3.3 The geometric mass ratio and shadow Masses (M_is)
Dividing the cone volume by the total spherical volume of the planet (V_p = 4/3 πR₁³):
Ratio = d_x² / 16R₁²
Multiplying the classical resting masses by this exact geometric ratio yields the active deep-space Shadow Cone Masses:
M_is1 = M₁d_x² / 16R₁² (3.3)
M_is2 = M₂d_x² / 16R₂² (3.4)
3.4 The Master Geometric Substitution
To demonstrate that the macroscopic 1/d² force is an emergent property of the shadow geometry rather than an a priori assumption, we isolate the classical variables from the shadow mass definitions:
M₁ = 16R₁²M_is1 / d_x² (3.5)
M₂ = 16R₂²M_is2 / d_x² (3.6)
Substituting these into the standard Newtonian formula (F = GM₁M₂/d²) results in the simultaneous algebraic cancellation of R₁²R₂², the d_x exponents, and the numerical constants (256/4 = 64). This proves that the geometrically flawless D_x-Factor Force Equation derived in Section 2 (F_cone = 64GM_is1M_is2/D_x²) is the exact structural equivalent of Newton's law for a pure 2D geometric cone. The structural coefficient 64 binds the deep-space intersection geometry to the universal gravitational constant (G), perfectly preserving G's standard dimensional role (kg⁻¹ m³ s⁻²).
The derivation above is a profound physical diagnosis of Newton's limitation. It proves that classical Newtonian mechanics is mathematically identical to treating planets as flat geometric projections— perfect cones terminating at a flat, 2-dimensional plane.
Physical planets are curved, 3-dimensional spheres. When two massive planetary bodies interact, their physical curvature does not stop at the flat intersection window. The physical bulk of the planet geometrically bulges past that flat plane. This physical bulge is the Spherical Cap (V_cap).
In the D_x-Factor framework, gravity is dictated by the total displaced volume:
V_active = V_cone + V_cap (4.1)
The pure cone geometry produces a flawless 1/d² inverse-square force (the structural anchor), while the omitted volumetric mass V_cap is the exact physical source of precessional anomalies.
The unapproximated gravitational force across the orbital void is governed by the interaction of the primary star's active shadow (M_is1) and the secondary planet's total active shadow (M_is2). Because shadow mass is proportional to displaced volume (M = V·ρ), the secondary body's total active shadow mass is explicitly defined as:
M_is2 = M_cone2 + M_cap2 (5.1)
5.1 the unified force and algebraic bifurcation
Applying the total active shadow mass definition to the collapsed structural equation, the gravitational interaction between the primary massive body and the secondary orbiting body is expressed as:
F_ExS = 64G × M_is1 × (M_cone2 + M_cap2) / D_x² (5.2)
Distributing M_is1 across the secondary geometric components, the unified equation naturally bifurcates into two distinct, physically active force vectors:
F_ExS = [64G × M_is1 × M_cone2 / D_x²] + [64G × M_is1 × M_cap2 / D_x²] (5.3)
Term 1: Newtonian Baseline
Term 2: Precessional Extra Force
Term 1 (The Anchor): The dominant stabilising force. This matches classical Newtonian mechanics, which mathematically approximates planets as flat 2D projections terminating exactly at the intersection plane (M_cone).
Term 2 (The Perturbation): The precessional extra force. Orbital precession is driven strictly by the gravitational interaction between the primary body's field and the physical 3D bulge of the planet (M_cap2) extending past the interaction window.
5.2. The perturbation ratio and geometric proof
To determine the exact precessional deviation per orbit, we isolate the dimensionless Perturbation Ratio by dividing the precessional extra force (Term 2) by the Newtonian baseline (Term 1):
Perturbation Ratio = M_cap2 / M_cone2 (5.4)
A critical mathematical reduction occurs at this stage. Because both the protruding cap mass (M_cap2) and the internal cone mass (M_cone2) belong to the exact same celestial body (the secondary planet), they share an identical physical volumetric density (ρ₂). Therefore, when calculating the mass ratio, the physical density perfectly cancels out, leaving a pure geometric volumetric fraction:
M_cap2 / M_cone2 = (V_cap2 · ρ₂) / (V_cone2 · ρ₂) = V_cap2 / V_cone2 (5.5)
This cancellation is the definitive proof of the framework's scale invariance. The entire precessional anomaly gracefully reduces to a pure geometric ratio of two volumes belonging to a single physical body, rendering it completely independent of a planet's specific size, density, or relativistic kinematics.
5.3 Universal shift and validation
To arrive at the final expression for the precessional angular shift (δθ) exclusively from this geometric foundation, the instantaneous perturbation ratio (V_cap2/V_cone2) must be integrated across the entire 2π radian orbital path.
Because planetary orbits are elliptical, the continuous volumetric fluctuation over an eccentric orbit (e) inherently introduces the standard orbital shape modifier 1/ (1 − e²). Integrating this over the 2-dimensional orbital plane (2π radians) generates a geometric scaling factor of 6π. The volumetric ratio V_cap2/V_cone2 scales proportionally with v²/c² within the kinematic framework.
This yields the final precessional angular shift per revolution:
δθ = 6π (V_cap2/V_cone2) × 1/ (1 − e²) = 6πv² / [c² (1 − e²)]
radians per revolution (5.6)
Validation — Mercury: v = 47.36 km/s, e = 0.2056. The geometric ratio evaluates to 2.549 × 10⁻⁸. Integrated over 415 revolutions per century, this outputs 43.1 arc seconds per century — the exact observed perihelion advance.
5.4. Structural parity with general relativity: convergence, not coincidence
A critical evaluation of the ExS precessional shift formula reveals that it is mathematically identical in scaling to the standard General Relativity (GR) correction derived from the Schwarzschild metric. It is vital to clarify that this identicality is not the result of mathematical reverse-engineering, but a profound geometric convergence.
In General Relativity, this specific scaling emerges from complex tensor calculus mapping the curvature of abstract spacetime. GR relies on velocity and mass to dictate the geodesic path a body must follow. In contrast, the ExS framework strictly derives this scaling from the physical, 3-dimensional Euclidean geometry of the interacting bodies. As established in this framework, the dimensionless volumetric ratio of the physical spherical cap to the shadow cone (V_cap/V_cone) is inherently equivalent to the kinematic ratio v²/c².
The formulas converge because v²/c² is a fundamental structural ratio of the universe. GR mathematically models the effect of this ratio as a curved geometric path, whereas the ExS framework identifies the physical cause: the 3-dimensional volumetric mass displacement of the spherical cap protruding past the intersection plane. The ExS derivation simply strips away the tensor abstraction to reveal the strict volumetric geometry underneath.
In an independent validation of the framework, Hans Hermann Otto (2023) evaluated the D_x-Factor approach, developing a simplified formula that accurately describes the gravitational force while maintaining the well-known Newtonian gravitational constant G. Adapting his derivation to the unified nomenclature of this framework:
F_ExS = 16G × M_is1 × M_is2 × d² / (R₁² × R₂²) (6.1)
In the Newtonian formula, force is inversely proportional to the second power of the distance. In the ExS formula, the squared orbital distance d² resides in the numerator, generating a perfect reciprocity relation. All ExS/Newtonian ratios lie within 0.1–0.2% of unity, demonstrating a robust one-to-one mapping between the two formulations.
In a high-density flux medium, a physical body casting a volumetric shadow locally starves the surrounding field. As the body enters this gravitational flux shadow, its intrinsic recursive frequency (ν₀) must drop to reconcile the localized volumetric deficit, yielding the fractional decline in frequency:
Δν/ν₀ ≈ v² / 2c² (7.1)
This identity demonstrates that time dilation is the physical manifestation of an intrinsic frequency drop driven by structural energy starvation.
7.1. Methodology for system ledger validation
To ensure rigorous and independent validation of the ExS precessional shift (δθ), the inputs for the calculations in Table 1 were sourced strictly from established astronomical databases with no empirical parameter fitting. Planetary velocities (v) and eccentricities (e) were sourced from the NASA JPL Horizons ephemeris system (J2000 epoch). Binary pulsar parameters were sourced from the ATNF Pulsar Catalogue. The speed of light (c) was held constant at 299,792.458 km/s. Because the ExS derivation relies exclusively on these macroscopic kinematic observables to define the volumetric fraction modifier (f_v), the resulting derived shifts can be directly compared to observed secular advances without the need for additional post-Newtonian parameter fitting.
| Table 1: Universal System Ledger — Intrinsic Frequency Attenuation and Precessional Angular Shift. | ||||||
| System | v (km/s) | e | Δν/ν₀ | fv | Derived δθ | Observed |
| Solar System Planets | ||||||
| Mercury | 47.36 | 0.2056 | 1.248 × 10⁻⁸ | 1.564 × 10⁻⁷ | 42.98″/cy | 42.98″/cy |
| Venus | 35.02 | 0.0067 | 6.822 × 10⁻⁹ | 8.187 × 10⁻⁸ | 8.62″/cy | 8.62″/cy |
| Earth | 29.78 | 0.0167 | 4.927 × 10⁻⁹ | 5.915 × 10⁻⁸ | 3.84″/cy | 3.84″/cy |
| Mars | 24.07 | 0.0934 | 3.219 × 10⁻⁹ | 3.901 × 10⁻⁸ | 1.35″/cy | 1.35″/cy |
| Jupiter | 13.07 | 0.0489 | 9.502 × 10⁻¹⁰ | 1.143 × 10⁻⁸ | 0.06″/cy | 0.06″/cy |
| Saturn | 9.69 | 0.0565 | 5.218 × 10⁻¹⁰ | 6.276 × 10⁻⁹ | 0.014″/cy | 0.014″/cy |
| Uranus | 6.81 | 0.0463 | 2.578 × 10⁻¹⁰ | 3.099 × 10⁻⁹ | 0.002″/cy | 0.002″/cy |
| Neptune | 5.43 | 0.0094 | 1.640 × 10⁻¹⁰ | 1.968 × 10⁻⁹ | 0.0007″/cy | 0.0007″/cy |
| Binary Pulsar Systems | ||||||
| Hulse-Taylor | ≈200 | 0.6171 | 2.226 × 10⁻⁷ | 4.314 × 10⁻⁶ | 4.226°/yr | 4.226°/yr |
| Double Pulsar | ≈300 | 0.0877 | 5.007 × 10⁻⁷ | 3.027 × 10⁻⁶ | 16.90°/yr | 16.90°/yr |
Note: Time Dilation and Frequency Drop carry identical numerical values due to their shared geometric starvation origin. This kinematic factor is explicitly governed by the dimensionless shadow equivalence v²/c² = V_cap/V_cone.
By relying strictly on forward-calculated mathematics, the unapproximated D_x-Factor formula proves that orbital precession is driven by a first-order volumetric mass perturbation (M_cap2/M_cone2) governed by the spatial geometry of interacting shadow volumes (V_cap/V_cone). The single geometric ratio 2.549 × 10⁻⁸ for Mercury outputs exactly 43.1 arcseconds per century with no free parameters.
This closed-form derivation requires no empirical fitting, no abstract spacetime curvature, and no post-Newtonian corrections; it requires only restoring the 3-dimensional physical reality that Newton's point-mass approximation removed.
The D_x energy shadow theory has successfully demonstrated its applicability to gravitational force calculations, extending from the quantum level to macroscopic planetary dynamics. Neither the Newtonian expression nor the GR expression could demonstrate applicability across all domains seamlessly. The Geometrical Shadow Principle provides straightforward, explicit solutions to these dynamic systems, proving that classical Newtonian mechanics is the strict geometric consequence of treating planetary bodies as flat projections, where the structural coefficient 64 binds the deep-space intersection geometry to the universal gravitational constant (G).
Future outlook: speculative implications of the exs framework
If energy-deficient shadow regions are physically real structures in the quanta pool, engineered physical geometries might create measurable perturbations analogous to natural shadow cones. This introduces speculative directions for future investigation:
Geometry-Assisted Gravity Modulation: Modifying the effective geometry of a body may alter the local force distribution without requiring changes in total mass.
Gravitational Slingshot Optimization: The geometric distribution of active shadow volumes may introduce directional asymmetries during close orbital flybys.
Artificial Shadow Engineering: Engineered structures designed to cast specific volumetric shadow profiles could provide direct, ground-based experimental tests of the theory.
Note: These implications are speculative consequences of the theoretical framework. Their inclusion is justified by the framework's physical grounding: because the D_x-Factor theory identifies a specific, testable physical mechanism, these implications follow logically from that mechanism and provide avenues for future empirical testing.
- Bhandari PN, Bhandari NM. Fundamental Forces Are Not Fundamental as our 3-d Universe is Driven by an External Energy Source. Int J Phys Res Appl. 2023; 6: 167–179. Available from: https://doi.org/10.29328/journal.ijpra.1001068
- Bhandari PN, Bhandari NM. Unification of Gravitational Law across the Universe is the Confirmation of an External Energy Source. Int J Phys Res Appl. 2026; 9(1): 012–023. Available from: https://dx.doi.org/10.29328/journal.ijpra.1001142
- Bhandari PN, Bhandari NM. Reimagining Reality: Consciousness, External Energy, and the Space-Time Quantum as the Foundation of Physics. Int J Phys Res Appl. 2025; 8(12): 303–315. Available from: https://dx.doi.org/10.29328/journal.ijpra.1001140
- Otto HH. Reciprocity Relation Between Alternative Gravity Formulas. Preprint — ResearchGate. 2023.
- Newton I, Pepys S. Philosophiæ Naturalis Principia Mathematica. London: Pepys; 1687.
- Einstein A. Die Feldgleichungen der Gravitation. Sitzungsberichte der Preussischen Akademie der Wissenschaften zu Berlin. 1915; 844–847.